Viele Jahre habe ich Urlaub mit dem Hausboot auf deutschen Gewässern gemacht - sowohl die Abgeschiedenheit als auch den Umgang mit dem Wassergefährt genossen. In den letzten Jahren jedoch ist diese Freizeitbeschäftigung zum Trend geworden und immer mehr Urlauber drängten in die Reviere. Die Preise schossen in erstaunliche Höhen und die Ruhe war ebenfalls dahin…
Es ist also Zeit für ein eigenes Schiff in neuen Gewässern! Und in diesem Fall ein Schiff im Maßstabe 1:87 in den Gewässern von Modellbauanlagen oder Gartenteichen.
Der Name stand schon vor Beginn des Baus fest. Das Boot sollte "Aurora" heißen - die "Morgenröte".
Bausatz als Grundlage
Faller bietet den Bausatz # 131008 mit 2 Hausbooten an. Mit dabei sind diverse Ausstattungsteile, wie Tische und Sonnenschirme. Der Rumpf der Model ist allerdings nur als sog. Wasserlinienmodell ausgelegt – sprich der untere Teil des Rumpfs, der normalerweise unter Wasser wäre, ist nicht vorhanden. Damit lassen sich die Modelle auf normalen Eisenbahnanlagen positionieren. Eines dieser Modelle ist z.B. auf der Anlage von SmileStones in Schaffhausen zu sehen.

Mein Modell sollte allerdings schwimmfähig sein. Dazu habe ich mit dem ebenso geschätzten wie erfahrenen Modellbau-Kollegen Klaus das Unterteil zum Faller Hausboot konstruiert und auf dem 3D-Drucker erzeugt. In die Konstruktion sind zwei runde Ausbuchtungen eingearbeitet, die zwei 6mm Elektromotoren aufnehmen können. Ein Ruder wurde nicht vorgesehen, denn die Steuerung sollte über die beiden Motoren funktionieren, die jeweils getrennt voneinander - im Prinzip der sog. "Panzer-Steuerung" - zu anzufahren sein sollten. Ich entschied mich für diese Art der Steuerung um das Gewicht eines Servos einzusparen.
Der Rumpf zum Faller Hausboot ist als druckfähige Datei bei Thingiverse zu finden.
Anpassungen und Innenausbau
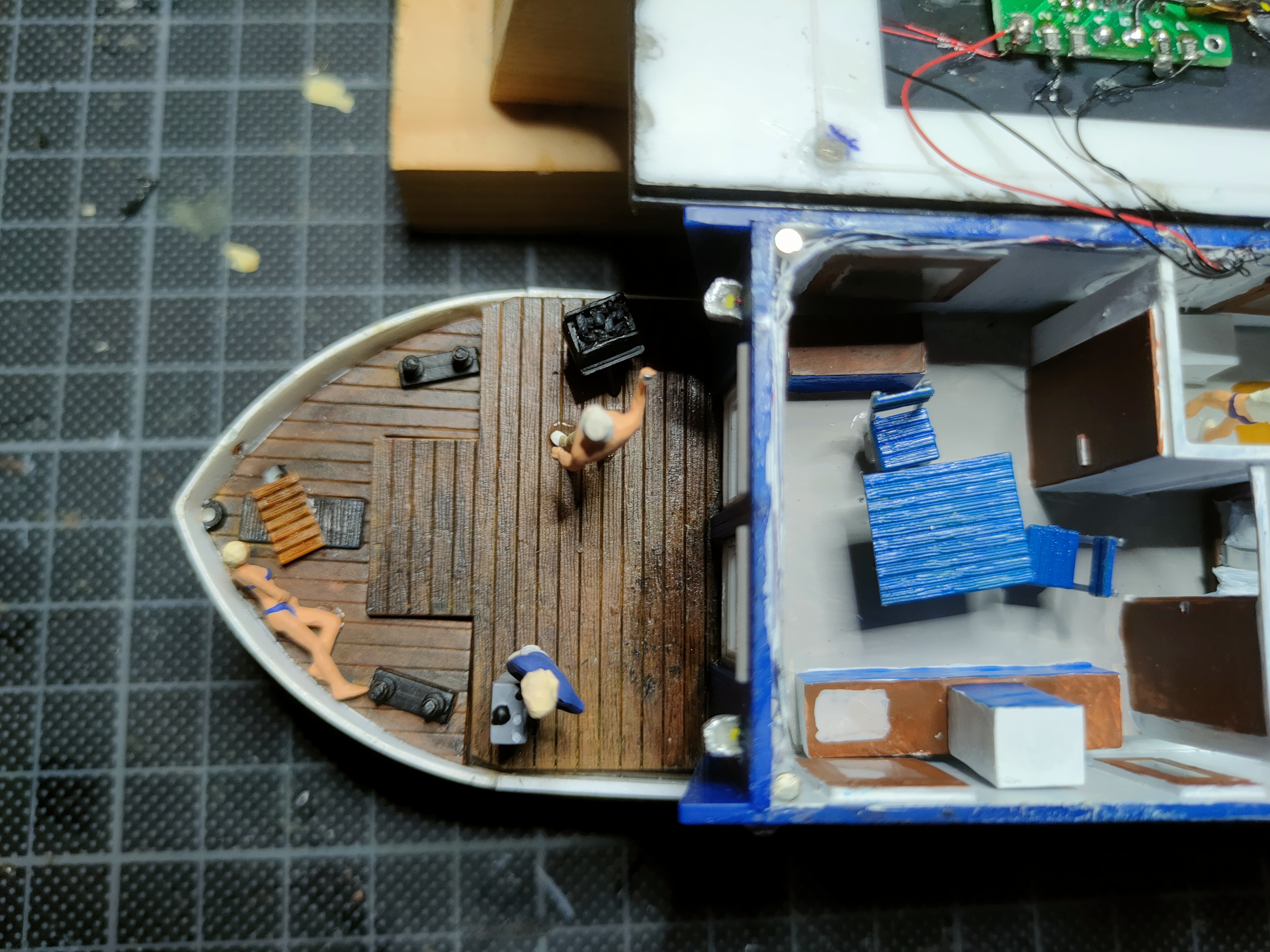
Das Modell von Faller lässt im ursprünglichen Zustand aus der Packung kommend natürlich sehr stark den Kunststoff erkennen, aus dem es gefertigt wurde. Ich entschied mich das Deck farblich mehr nach einem Holzdeck aussehen zu lassen. Auch die blauen Wände des Aufbaus dunkelte ich etwas nach um einen gealterten Zustand zu simulieren.
Etwas merkwürdig und unrealistisch empfand ich, dass es keine Möglichkeit gab vom Inneren des Aufbaus auf das Achterdeck des Bootes zu gelangen. Sicherlich, bei den echten Booten gibt es die Möglichkeit seitlich am Haus über sehr schmale Laufflächen nach hinten zu gelangen. Dafür sind oft Haltestangen vorhanden, die hier allerdings nicht vorgesehen waren. Außerdem sind meist dennoch Türen im Heck der Boote vorhanden, um einen bequemen Zugang zum Achterdeck zu bieten. Ich entschied mich also aus einem Stück Kunststoff und etwas Rundmaterial eine Tür am Heck nachzubilden.
Faller hat am Heck des Hausboots ein überdimensioniertes Ruderblatt entsprechendem Arm vorgesehen. Diese Lösung gefiel mir optisch nicht und passt auch nicht zur Steuerung über die beiden Motoren, für die ich mich entschieden hatte. Also wurden die Halterungen am Heck des Modells entfernt und stattdessen einen Steuerstand im 3D-Druck erzeugt, welcher auf dem Vorderdeck platziert wurde und dort von einem ergrauten Urlauber bedient wird. Der Steuerstand ist ebenfalls auf Thingiverse zu finden.
Und was wäre nun ein Hausboot-Urlaub ohne die Möglichkeit einen Grill anzuwerfen? Natürlich musste also auch ein Grill montiert werden, welcher aus verschiedenen Kunststoff-Resten aus anderen Bausätzen gefertigt wurde. Am Grill steht der bauchige Koch und brutzelt Steaks und Würstchen für die Crew. Im Grill sind eine rote und eine orange LED untergebracht, darüber etwas feiner schwarzer Sand. Die Steuerung der LED beschreibe ich weiter unten in einem eigenen Absatz.
Des Weiteren gefiel mir der Gedanke, dass man beim Blick durch die Fenster zumindest die Illusion eines vorhandenen Innenlebens des Boots bekommt. Dazu konstruierte ich eine Raumaufteilung in Wohn- und Kochraum, Schlafzimmer und Bad und erzeugte diese Struktur ebenfalls auf dem 3D-Drucker. Auch diese Datei steht im Paket auf Thingiverse zum Download bereit. Im Nachgang musste ich jedoch eingestehen, dass man vom Innenraum wenig sieht, dieser aber in Resin gedruckt schon einiges an Gewicht auf das Schiff mitbringt - beim nächsten Schiff würde ich also auf einen Innenausbau wohl verzichten.
Funkanlage und Motoren
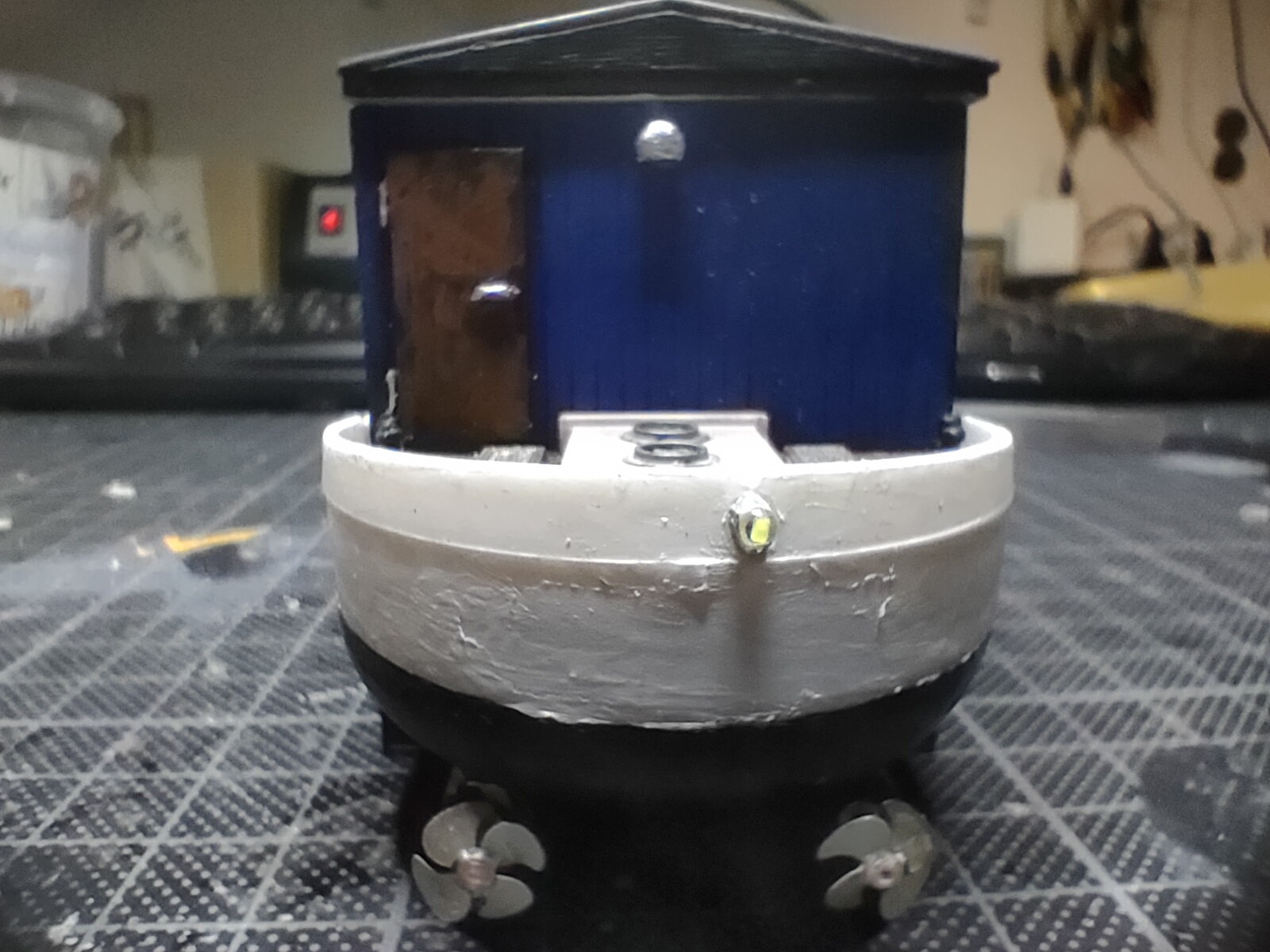
Am Heck des Rumpfes sind zwei 6mm Elektromotoren angebracht. Und ja – die Motoren liegen direkt im Wasser. Keine Wellenanlage, kein Stevensrohr. Und ebenfalls ja – die Motoren funktionieren ohne Probleme! Mikromodellbauer fertigen die Antriebe schon seit einiger Zeit auf diese Weise, aber auch ich hatte lange meine Zweifel, ob das funktioniert. Es entsteht kein Kurzschluss – auf jeden Fall nicht in Süßwasser.
Die Motoren sind einzeln unabhängig voneinander steuerbar. Dazu verwende ich als Motortreiber den MotorTinyII, den der Kollege Klaus Wintermayr anbietet.
In diesem Modell verwende ich den 6 Kanal-Empfänger R614XN. Dieser bietet die Funkübertragung in den Protokollen DSM2 oder DSMx an. Zu beziehen ist der Empfänger in Deutschland entweder beim Händler Sol Expert Group, oder für deutlich günstigere Preise immer wieder mal bei den chinesischen Händlern Bandgood und Aliexpress.
Für die Steuerung der Antriebsmotoren wird jeweils ein Kanal benötigt. Ein dritter Kanal dient der Lichtsteuerung.
Einen weiteren Motor mit Planetengetriebe hatte ich im Bug des Schiffs vorgesehen und wollte damit eine Ankerwinde realisieren. Leider erwies sich dieser Versuch aber als Fehlschlag. Es gelang mir nicht einen halbwegs realistisch aussehenden Anker zu gestalten, der schwer genug war, um beim Abseilen in die Tiefe zu sinken. Also habe ich diesen Motor wieder entfernt und verzichte auf gemütliches Ankern mit dem Boot.
Die Stromversorgung wird vom 640 mAh Lithium Poloymer 1S Akku geliefert. Ladebuchse und Schalter sind natürlich ebenfalls verbaut. Der Akku liegt rutschsicher in einer Fassung, die auf dessen Maße im 3D-Druck erzeugt wurde.
Die Beleuchtung
Es ist oft die Beleuchtung, die einem Model den letzten Schliff gibt. Und bei einem Boot - bin ich der Überzeugung - ist dies besonders der Fall, wenn sich die Beleuchtung dann im Dunklen auf den Wasseroberflächen spiegelt.
Natürlich wurde eine vorbildgerechte nautische Beleuchtung vorgesehen. Rote und grüne Seitenbeleuchtung, weiß Leuchten am Heck und nach vorne gerichtet.
An der Spitze eines kleinen Masts befindet sich das Ankerlicht – auch wenn der Anker nicht mehr vorhanden ist.
Drei LED in entsprechenden Gehäusen zur Beleuchtung des Vorder- und Achterdecks.
Der Innenraum wurde mit zwei LED beleuchtet.
Und schließlich jeweils eine rote und eine orange LED im Grill um die Glut zu simulieren.
Die Beleuchtung ist mit einem ATTiny84 gesteuert, den ich unter Verwendung der Arduino IDE programmiert habe. Der ATTiny84 erhält vom Empfänger R614XN PWM-Steuerimpuls. Als Steuerimpuls gilt dabei eine entweder positiver oder negativer Ausschlag des PWM-Signals von der Nullstellung. Das PWM-Signal wird mit der Ardunio-Funktion pulseIn() gelesen.
Standardmäßig liegt ein PWM-Signal in der Nullstellung bei einem Wert von ca. 1500. Eine Abweichung wird in meinem Programm angenommen, wenn der gelesene PWM-Wert entweder unter 1200 oder über 1900 liegt. Diese Werte habe ich experimentell am R614XN für meinen Aufbau überprüft - laut Internet-Recherche handelt es sich dabei um Standardwerte. In einem gewissen Zeitfenster wird nun die Anzahl der positiven bzw. negativen Steuerimpuls gezählt und entsprechend in Anweisung umgewandelt.
An der Fernsteuerung wird mit einem Trigger die Abweichung des PWM-Signals erzeugt. Dies sollte ein Hebelausschlag auf einem linearen Kanal sein, kann aber auch mittels Schaltern erfolgen. Der verwendete Kanal sollte natürlich nicht in der Fernsteuerung durch Konfiguration limitiert sein und dann nur reduzierte PWM-Signale erzeugen. In einem solchen Fall könnte es passieren, dass die in der Programmierung vorgesehen Schwellenwerte (< 1200 und > 1900) nicht erreicht werden.
Das Hausboot hat fünf Beleuchtungsfunktionen: Nautisches Licht, Ankerlicht, Kabinenlicht, Beleuchtung an Deck und die Glut des Grills.
Um z.B. den Grill an zuwerfen bewege ich einen der Hebel an meiner Fernsteuerung drei mal von der Nullstellung nach links. Um den Grill wieder auszuschalten bewege ich den Hebel am Steuerkreuz erneut drei mal nach links um das Programm wieder auszuschalten.
Das Programm, dass ich in den ATTiny84 geladen habe, biete ich hier als TXT-Datei zum Download an.
Impressionen vom Bau
Neben dem Video auf YouTube habe ich hier noch ein paar Bilder vom Bau der Aurora.

Der Blick in den Rumpf zeigt die Positionierung der Bauteile: Akku, Motortreiber, Empfänger, Ladeanschluss und Schalter.
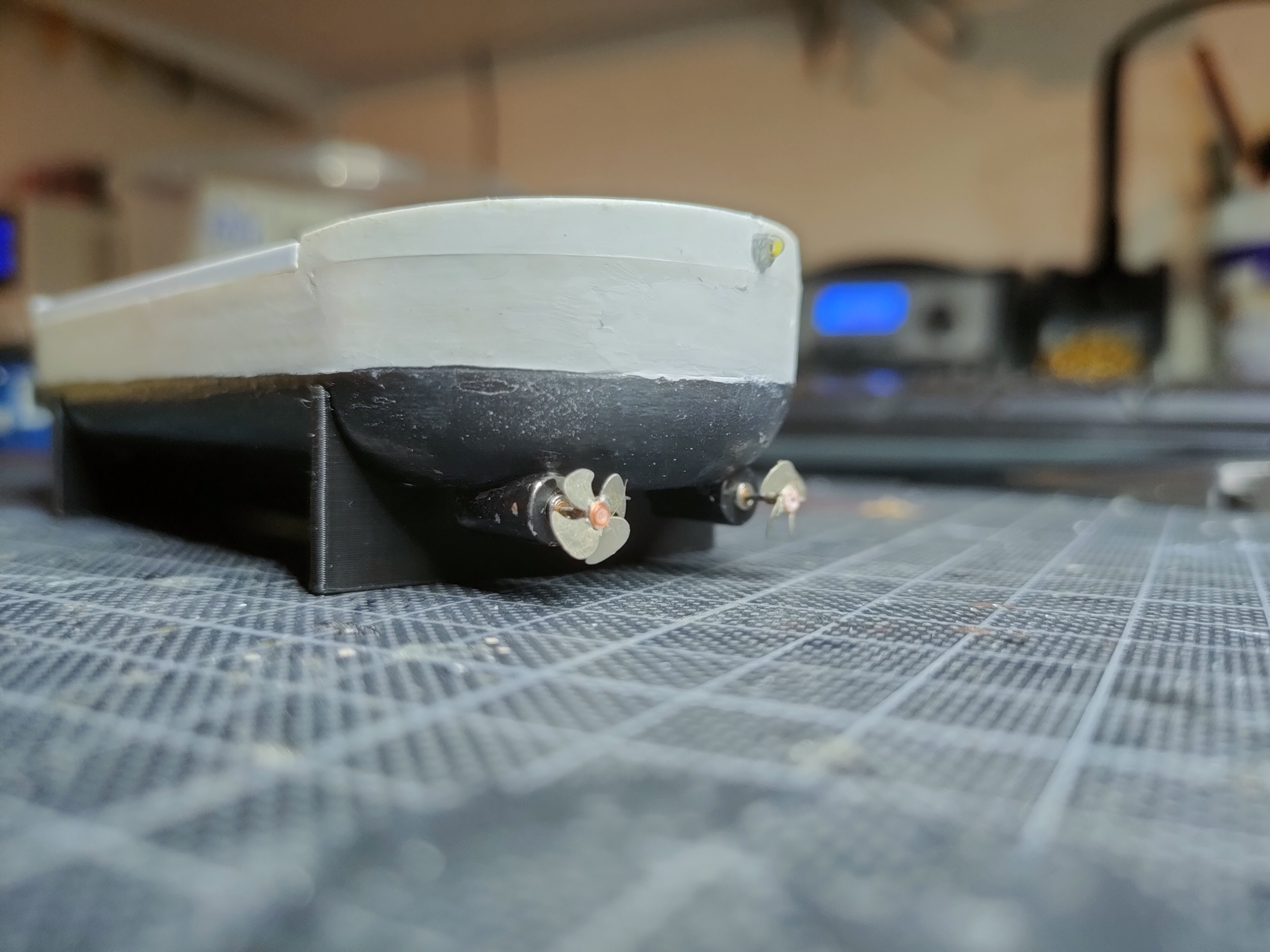
Die zwei Elektromotoren liegen beim Betrieb im Wasser. Die Steuerung erfolgt über die unabhängige Schraubenbewegung.
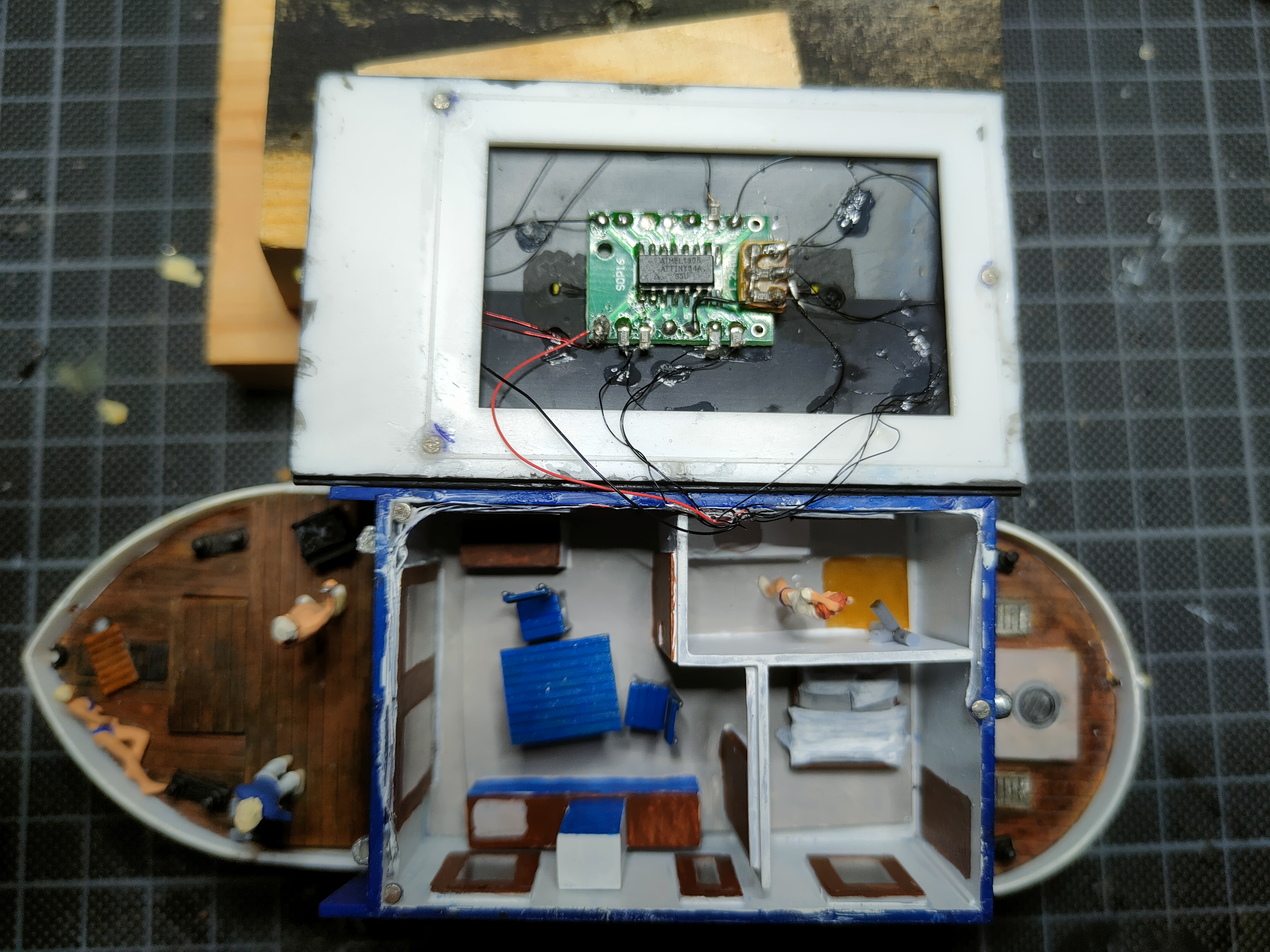
Das Dach ist mit kleinen Neodyn-Magneten am Aufbau befestigt. Damit ist auch eine spätere Wartung des Innenraums möglich.
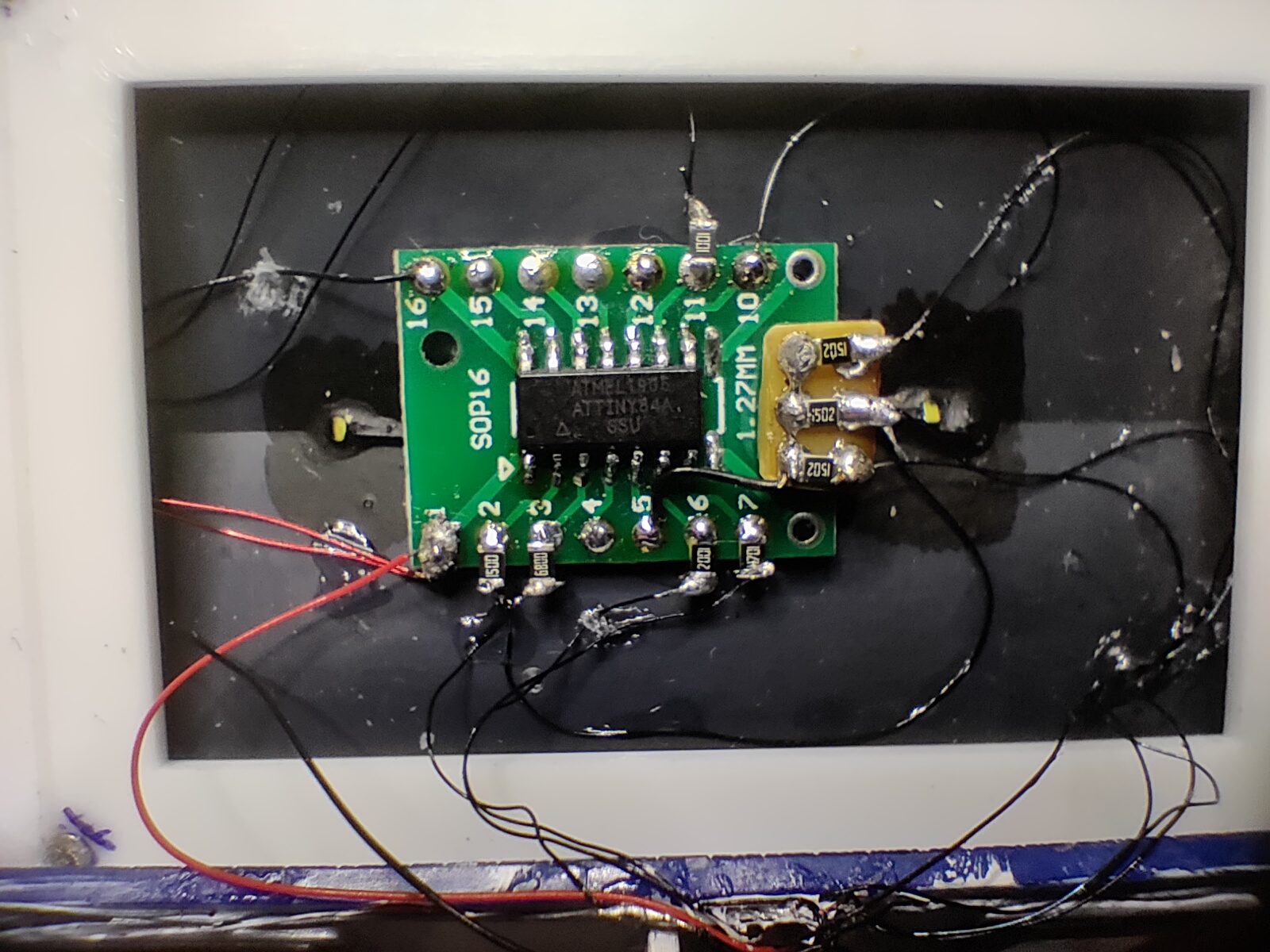
Im Dach ist ein ATTiny84 auf einer Break-Out Platine untergebracht. Damit werden die Lichtfunktionen gesteuert.
Der Grill auf dem Vorderdeck wird über zwei LED beleuchtet. Mittels PWM-Modulation wird ein leichtes Glimmen erzeugt.

Der Innenraum wurde aus Resin gedruckt und mit Möbelteilen aus dem Bausatz ausgestattet.
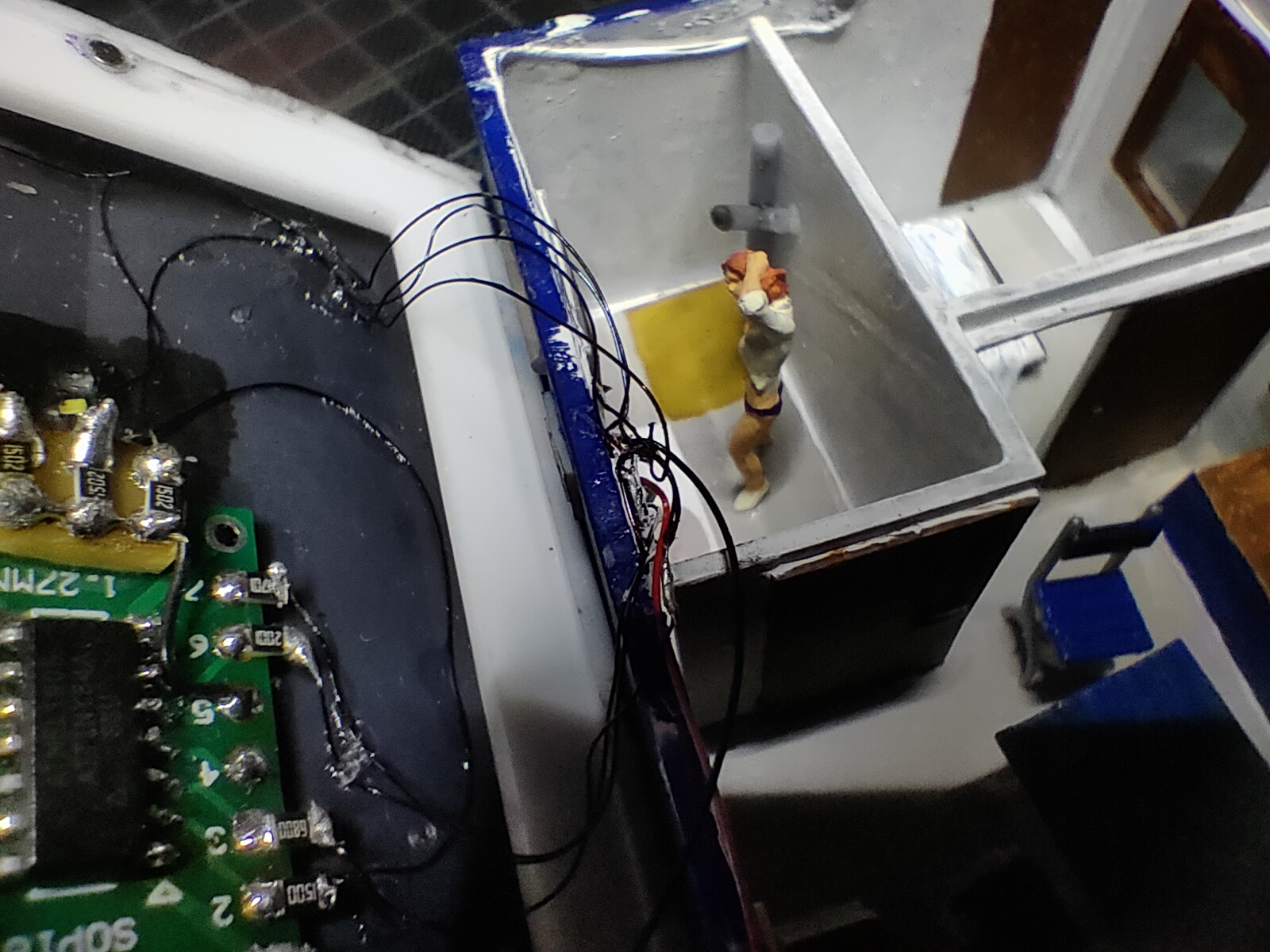
Auch das Bad ist in Benutzung - zumindest bis die Dame feststellt, dass die Abflüsse nicht funktionsfähig sind.
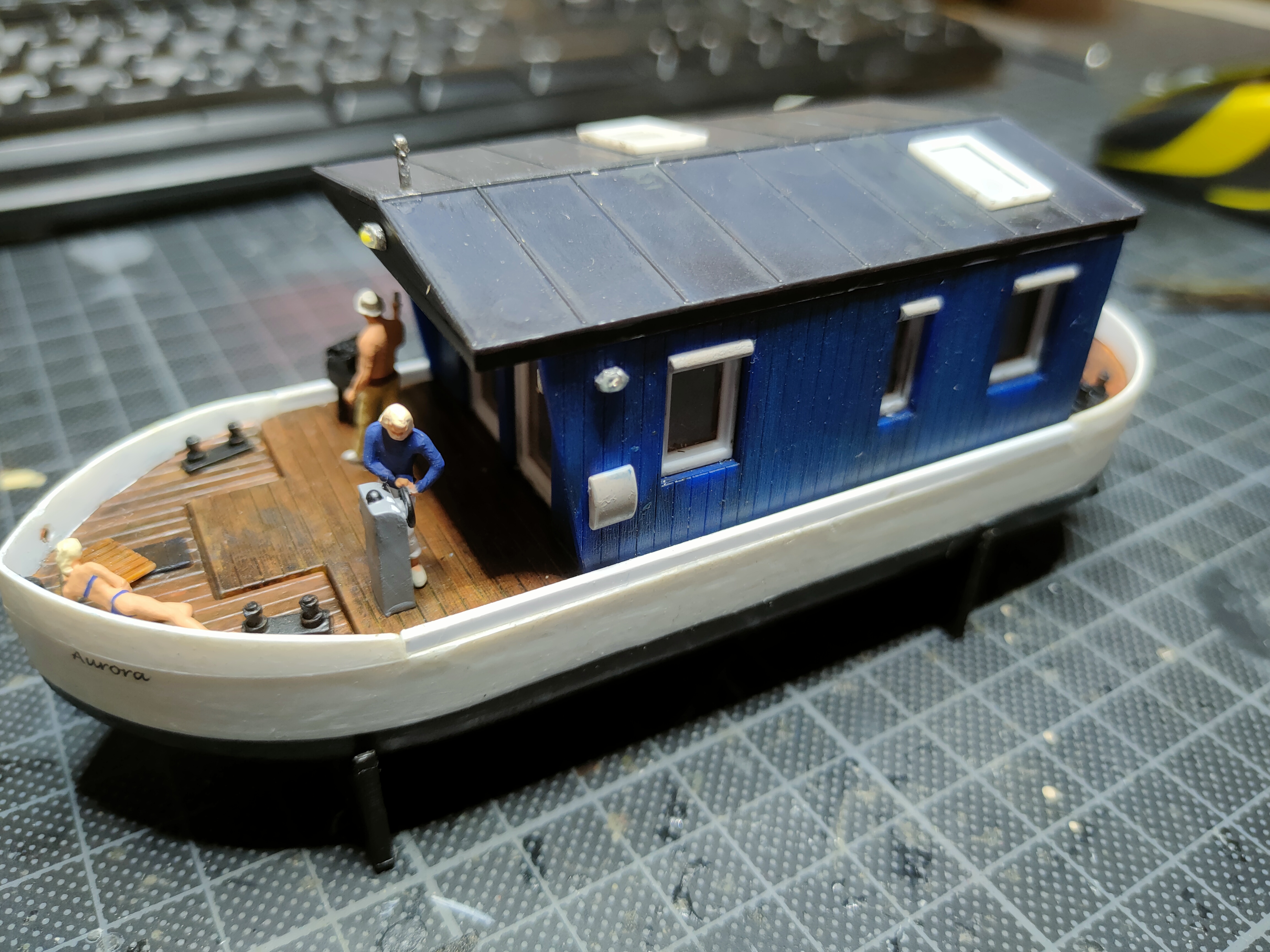
Die Plastikteile wurden etwas gealtert um etwas von dem Spielzeug-Look des Bausatz weg zu kommen.
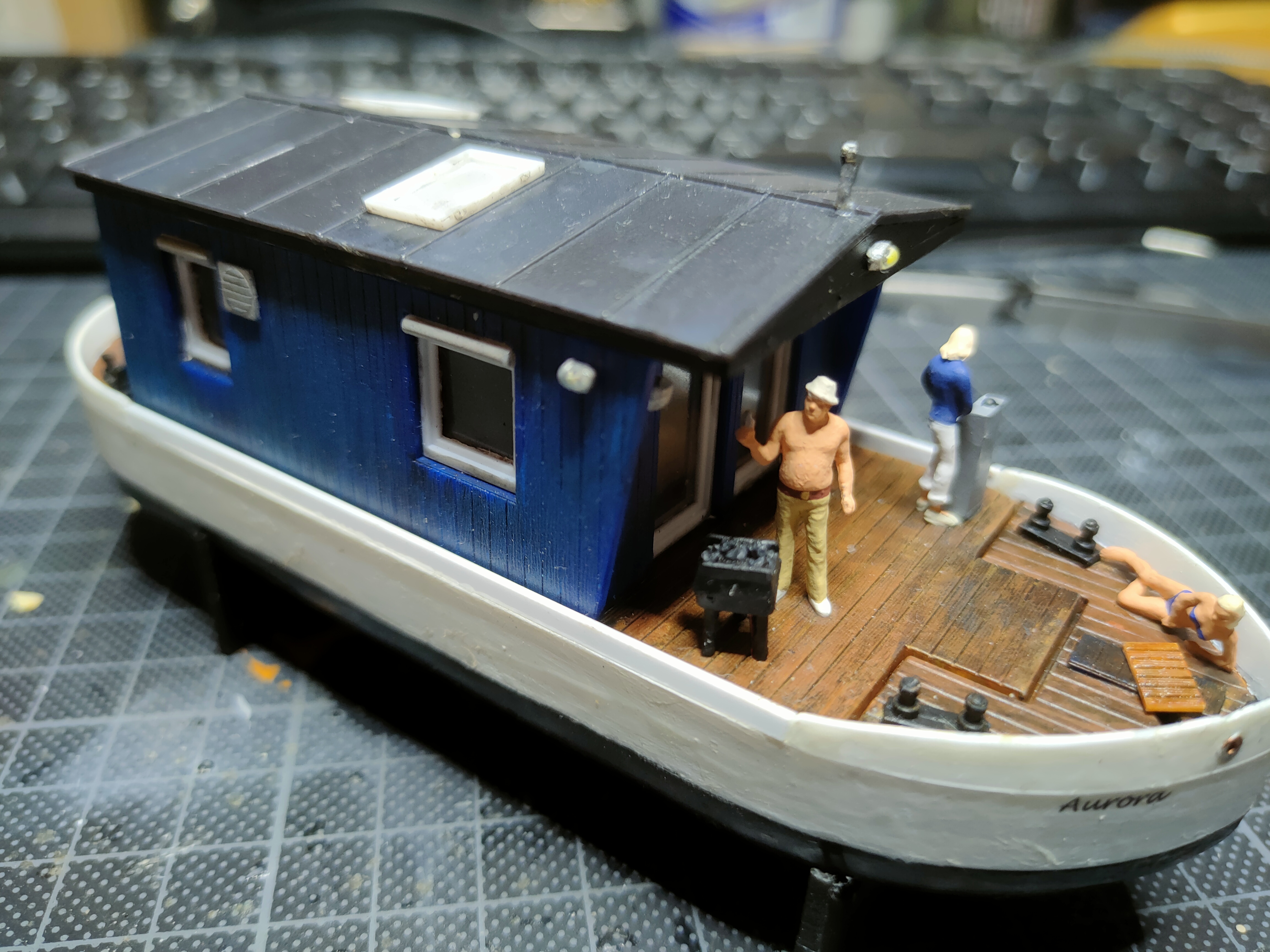
Der Grillmeister ist fertig zum Auslaufen...

... der Steuermann ebenfalls.
Das Achterdeck ist über eine Tür im Heck zugänglich.

Möge der Urlaub beginnen.